
Hi! I'm a MS Robotics student at the University of Pennsylvania's GRASP Laboratory, where I have been fortunate to work with Jason Ma, Edward Hu, Dinesh Jayaraman and Kostas Daniilidis.
I received my B.S. in Computer Engineering from ZJU and UIUC in 2024, advised by Said Mikki. and Wei Xiang.
I also spent time at IDEA-CVR as a research intern, advised by Xiaoke Jiang and Lei Zhang.
My research interests include VLAs, embodied reasoning and robot learning.
I am a passionate builder to make generalizable agents that can think and execute fine-grained manipulation, like brewing a cup of latte with an espresso machine.
This summer, I am working at Dyna Robotics, delivering high-performance reasoning VLA models. I am applying for a PhD position in Computer Science or Robotics. If you are interested in my research, please feel free to contact me.
Education
University of Pennsylvania
M.S.E. in Robotics
Advisor: Prof. Dinesh Jayaraman
Zhejiang University
B.E. in Electronic and Computer Engineering
University of Illinois at Urbana-Champaign
B.S. in Computer Engineering
Advisor: Prof. Said Mikki
Experience
Graduate Research Assistant — Daniilidis Research Group, GRASP Lab
Advisor: Prof. Kostas Daniilidis
Improve Spatial Reasoning of VLAs like Pi05 via Guidance and RL.
Research Intern — Dyna Robotics
Advisor: Dr.Jason Ma & York Yang
Building an agentic reasoning VLA for fine-grained manipulation tasks depending on memory.
Graduate Research Assistant — PennPAL Research Group, GRASP Lab
Advisor: Prof. Dinesh Jayaraman
Building VLMs-based Manipulation System via Diffusion Policy for fine-grained tasks. Reproduced ReKep, SPHINX and pi0.
Multimodal MLE Intern — IDEA-Computer Vision & Robotics Department
Advisor: Dr. Xiaoke Jiang & Prof. Lei Zhang
Build, train and optimize a small human-centric video captioning model based on Grounding DINO 1.6Pro.
News
September 2025
GRASP Student, Faculty and Industry(SFI) Committee Meeting
I joined Faculty and Industry(SFI) Committee at GRASP Lab, inbviting distinguished guests to share their insights and experiences.
August 2025
AAWR gets accepted by NeurIPS 2025!
AAWR: Real-World Reinforcement Learning of Interactive Perception Behaviors
July 2025
RoboArena gets accepted by CoRL 2025, welcome to our workshop!
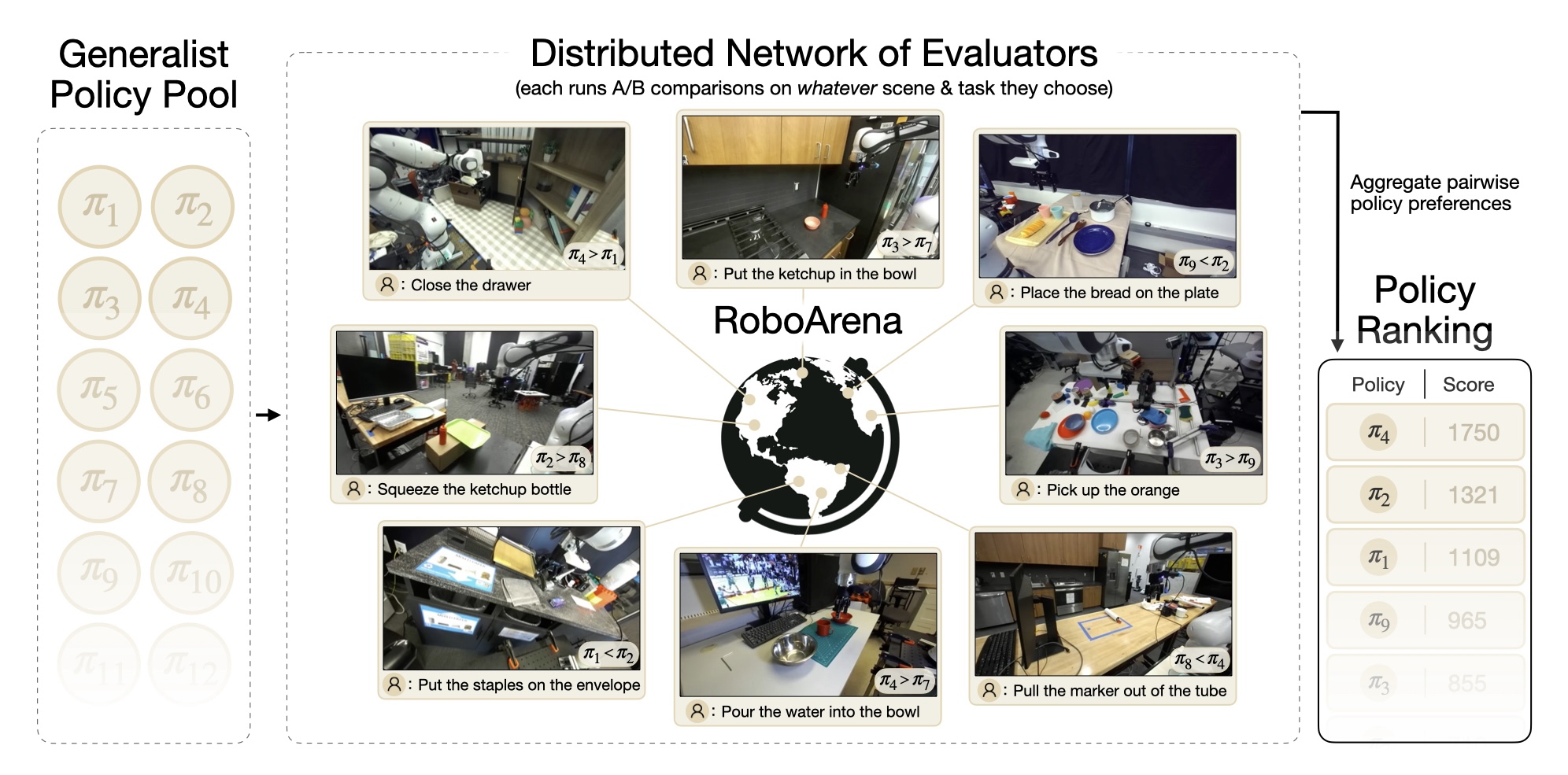
RoboArena: Distributed Real-World Evaluation of Generalist Robot Policies
June 2025
Research Internship at Dyna Robotics
At Dyna Robotics, I learned how to train large-scale VLAs models.
June 2025
ZeroMimic wins best paper in CVPR2025 3DVLMs workshop!
3D Vision Language Models for Robotic Manipulation: Opportunities and Challenges!
Publications
Under Review 2026
TiPToP: A Modular Planning-Based Robot Manipulation System
William Shen, Nishanth Kumar, Sahit Chintalapudi, Jie Wang, Christopher Watson, Edward S. Hu, Jing Cao, Dinesh Jayaraman, Leslie Pack Kaelbling, Tomás Lozano-Pérez
We propose a planning-based robotics system that solves complex real-world manipulation tasks directly from raw pixels and natural-language commands. Validated 'in-the-wild' at GRASP Lab.
Under Review 2026
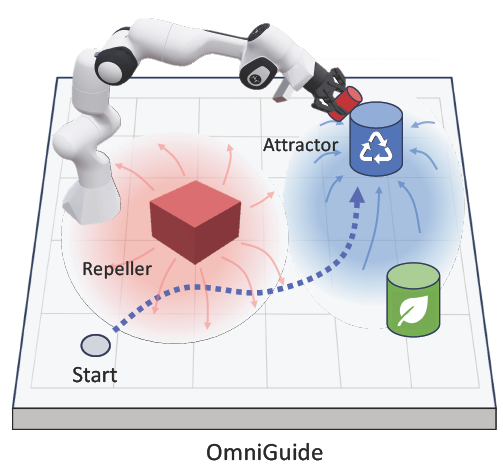
OmniGuide: Universal Guidance Fields for Enhancing Generalist Robot Policies
Yunzhou Song*, Long Le*, Yong-Hyun Park, Jie Wang, Junyao Shi, Lingjie Liu, Jiatao Gu, Eric Eaton, Dinesh Jayaraman, Kostas Daniilidis
We propose a a flexible framework that improves VLA performance on Spatial Reasoning tasks by leveraging prior knowledge from 3D foundation models, semantic-reasoning VLMs, and human trajectory.
Blog 2025
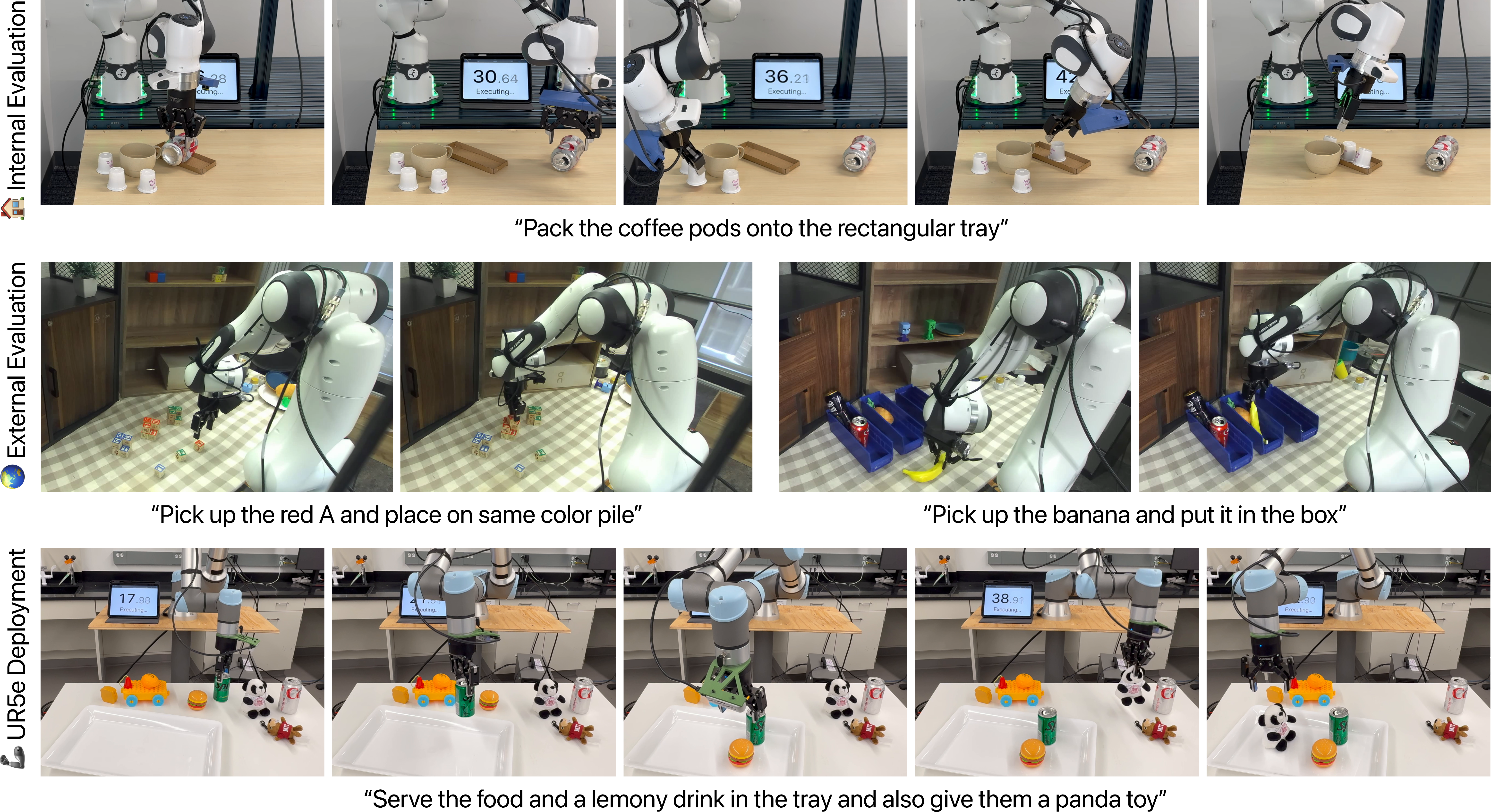
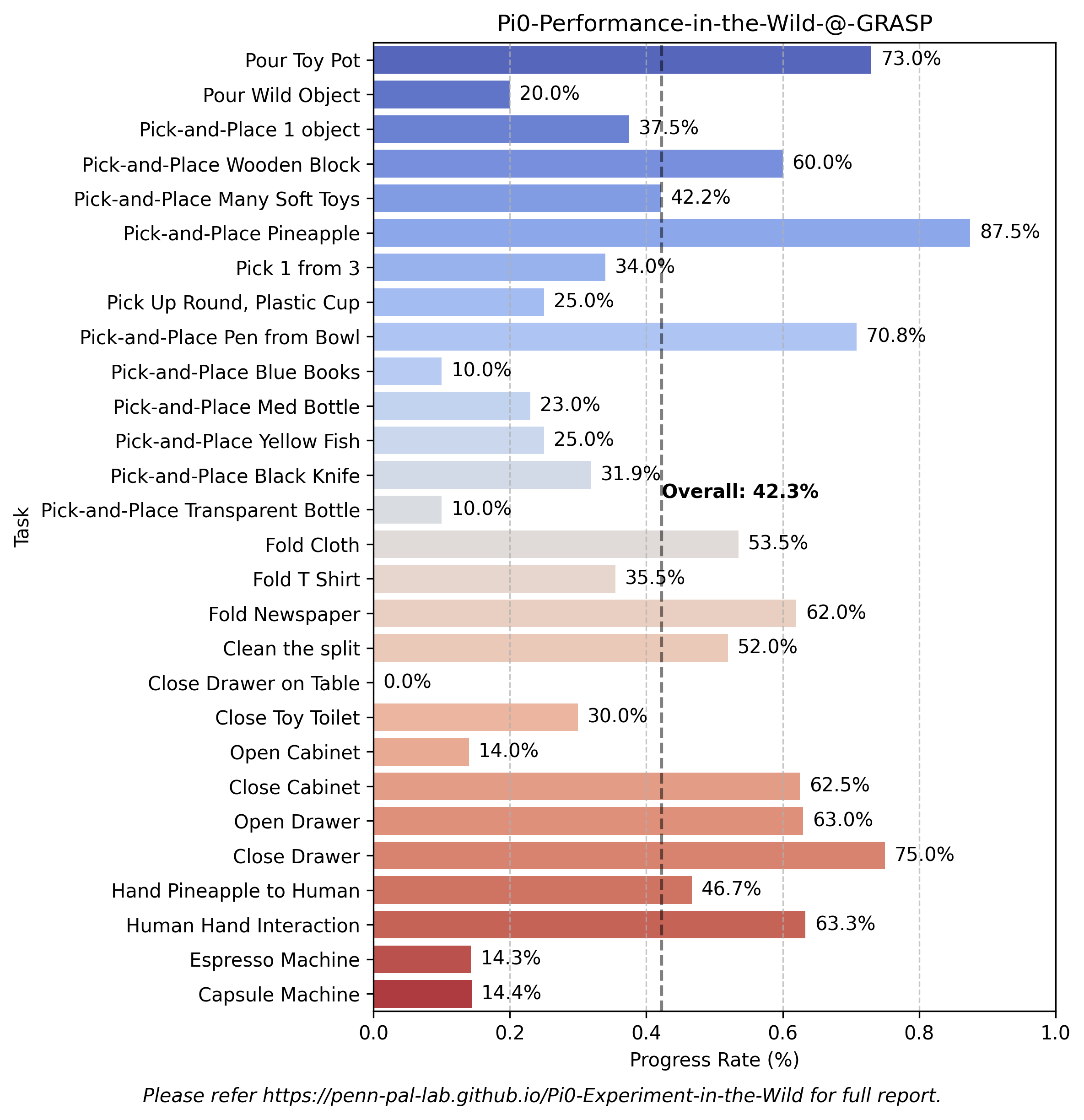
Evaluating pi0 in the Wild: Strengths, Problems, and the Future of Generalist Robot Policies
Jie Wang*, Matthew Leonard, Kostas Daniilidis, Dinesh Jayaraman, Edward S. Hu
We vibe-check pi0 across 300 trials on various manipulation tasks, summarize the insights and our observations in this blog.
ICRA 2025
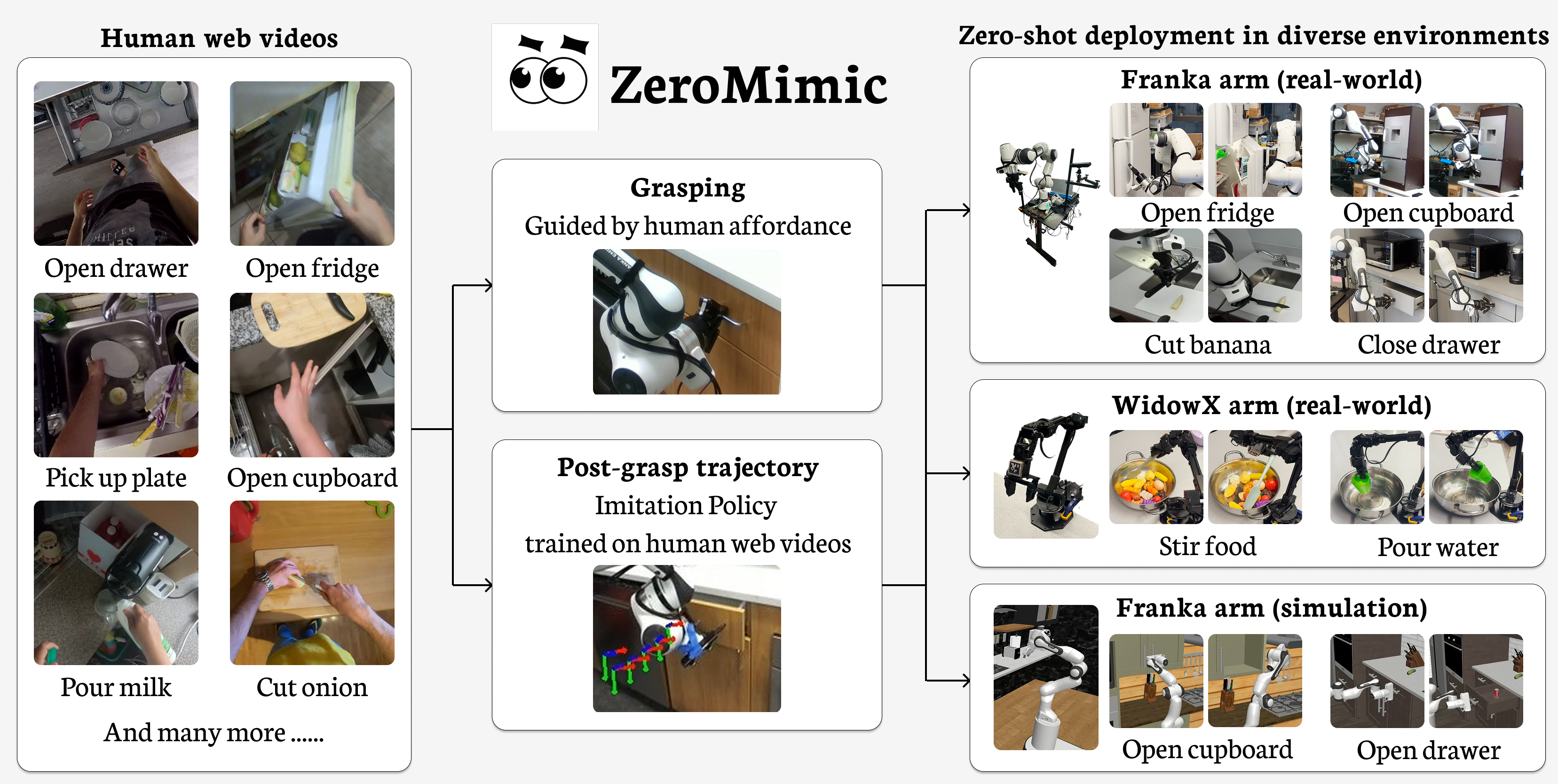
ZeroMimic: Distilling Robotic Manipulation Skills from Web Videos
Junyao Shi, Zhuolun Zhao, Tianyou Wang, Ian Pedroza, Amy Luo, Jie Wang, Jason Ma, Dinesh Jayaraman
Learning robotic manipulation skills from web videos with zero-shot generalization.
IEEE Transactions on Intelligent Transportation Systems 2025
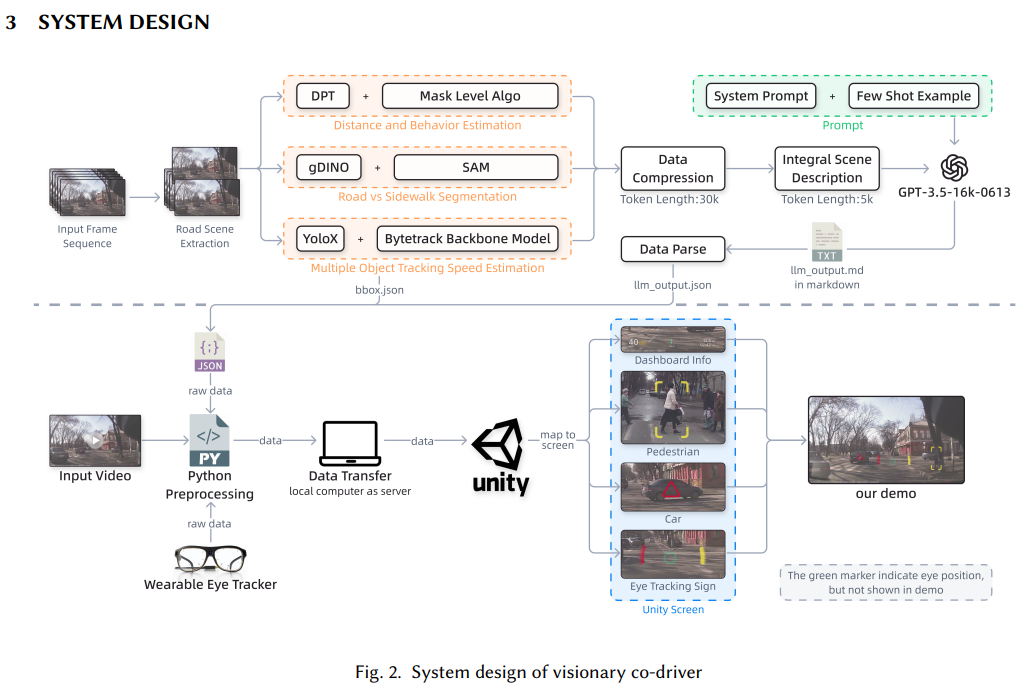
Visionary Co-Driver: LLMs Enhance Driver Risk Perception with ARHUD
Xiang Wei, Ziyue Lei, Jie Wang, Qi Zheng, Yingying Huang, Tianyi Zhang, Lingyun Sun
{kind=link}
Using LLMs and Vision foundation models to analyze autonomous driving road scene, modeling the behavior of pedestrians. Construct a HUD system to evaluate the driver interaction.
ICICT 2024
🏆 Oral Presentation
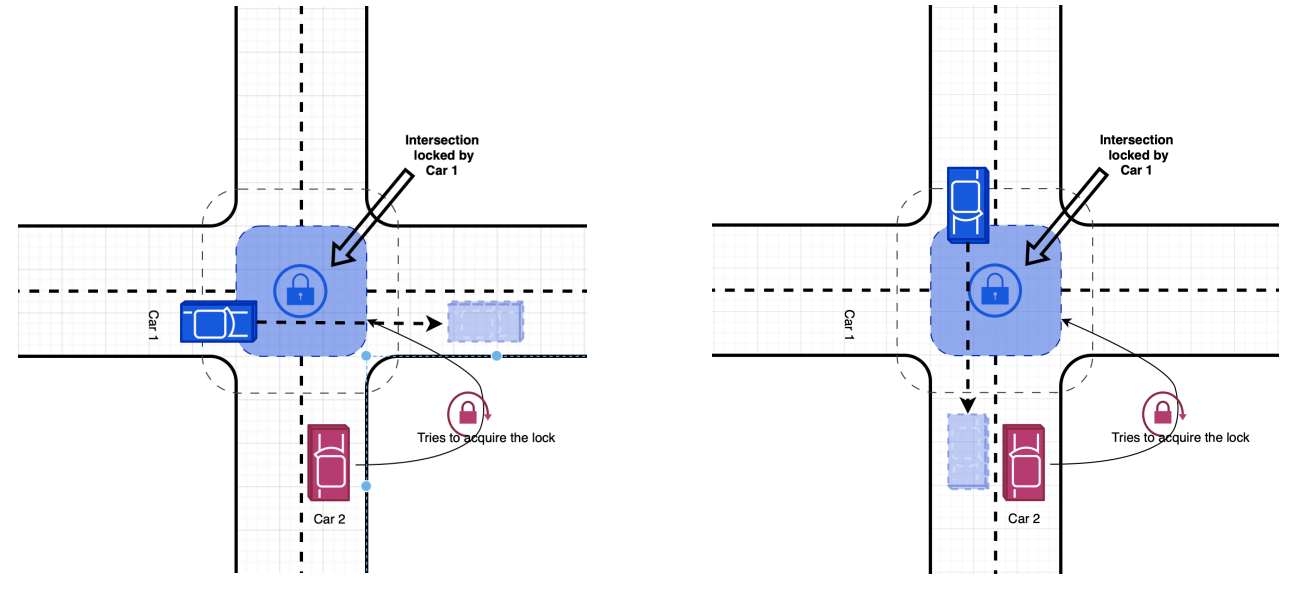
Real-time V2V Communication Network Cooperative Control System through Distributed Database,
Xinwen Zhu, Zihao Li, Yuxuan Jiang, Jiazhen Xu, Jie Wang, and Xuyang Ba
Using distributed databases for collision avoidance, verified on Quanser Car at crossroad scenario.
Portfolio

2025: Course Blogs of CIS7000: Real-World Robot Learning
A comprehensive collection of paper reading notes and algorithm reproductions for ESE6800/CIS7000 at UPenn. Learning from Prof. Antonio Loquercio and Prof. Dinesh Jayaraman on cutting-edge robotics research. 🤖📚
2024: CIS5190 RL-based High-Speed Drone Racing
Advisor: Prof. Antonio LoquercioBuilt a drone racing simulation with curriculum tracks (ellipse, split-S, UZH) using OmniDrones on IsaacSim & IssacLab. Designed a PPO-based reward function, achieving 40.7% success rate and 7.94 m/s average speed on a 127m track. Trained 150M frames across 250 parallel environments in 8 hours on 2 x NVIDIA A6000 GPUs. Explored domain randomization and trajectory-based methods for robustness.
2024: PhiloCoffee Club
A student club exploring the crossroads of coffee and philosophy, finding insights through the shared experience of a delicious cup of coffee.
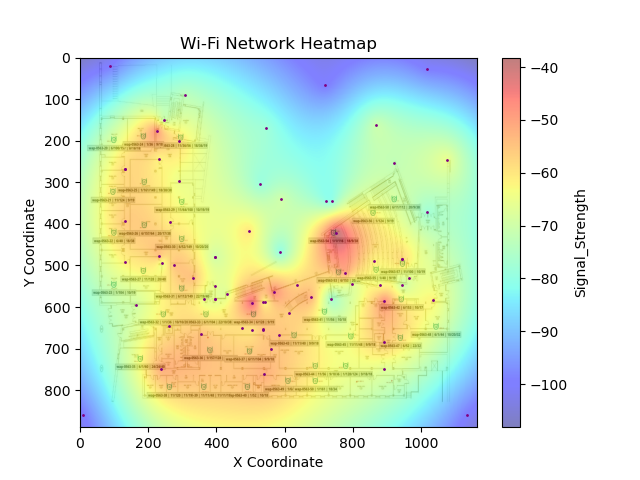
2023: CS438 Wireless Network Analysis Tool
A Python-based analytical tool for comprehensive wireless network analysis, featuring signal strength heatmaps and roaming mechanisms analysis. Developed in collaboration with UIUC IT Network team to study campus Wi-Fi infrastructure. 📡

2023: Shell Eco-marathon Autonomous Programming Competition
Developed autonomous driving modules using ROS and tested in CARLA simulator with Unreal 4 Engine. Focused on efficient path planning for Shell Eco-marathon competition. 🚗
2022: ECE391: MentOS - Multi-terminal Operating System
Developed a Linux-like OS kernel using C and x86, implementing core features like paging virtual memory, IDT, GDT, and i8259-based interrupt controller. Created device drivers for RTC, keyboard, PIT and a read-only file system. Established system call linkage between user and kernel space, with support for single CPU task scheduling and multiple terminal switching. ⚙️

2021: RoboMaster University Robotics Competition
Assisted in developing and optimizing vision algorithms for object detection via YOLOv4, contributing to auto-aiming and shooting system for real-time target engagement, improving hit accuracy by 20%. Supported the integration of vision systems on Jetson Nano with embedded platforms on DJI manifold2, achieving a 30 FPS during live competition on the industrial camera. 🤖

2021: Simulation and Modeling of Unmanned Vehicle Safety Test for Baidu Apollo D-kit
Assembled Lidar, Radar and Camera modules for Baidu Apollo D-kit Self-driving Test Vehicle. Constructed high- solution Lidar maps across ZJU international campus. Improved perception module for traffic state estimation based on collected data and literature review. 🚗