
Jie Wang
MS Robotics · UPenn GRASP Lab
University of Pennsylvania
Building robot learning infra that enables robots working in the wild
I'm an MS Robotics student at the University of Pennsylvania's GRASP Laboratory, working with Jason Ma, Edward Hu, Dinesh Jayaraman, and Kostas Daniilidis.
My research focuses on robot learning and embodied AI, building generalist agents that can reason and execute fine-grained manipulation from language commands and raw perception. I care about systems that work reliably both in the simulation and real world.
Previously I interned at Dyna Robotics, shipping high-performance reasoning VLA models for dexterous manipulation. I also interned at IDEA-CVR, advised by Xiaoke Jiang and Lei Zhang building open-world understanding models.
I received my B.S. in Computer Engineering from ZJU-UIUC in 2024, advised by Wei Xiang and Said Mikki.
I'm actively seeking for job opportunities in Robotics. If you are interested in my work, please feel free to contact me.
News
TipTop ranks #1 on the MolmoSpaces leaderboard
Our TipTop entry reached first place on the MolmoSpaces leaderboard.
GRASP Student, Faculty and Industry(SFI) Committee Meeting
I joined SFI Committee at GRASP Lab, hosting friends to share their insights at GRASP Lab
AAWR accepted at NeurIPS 2025
AAWR: Real-World Reinforcement Learning of Active Perception Behaviors
RoboArena gets accepted by CoRL 2025, welcome to our workshop!
RoboArena: Distributed Real-World Evaluation of Generalist Robot Policies
Selected Research
TiPToP: A Modular Open-Vocabulary Planning System for Robotic Manipulation
William Shen, Nishanth Kumar, Sahit Chintalapudi, Jie Wang, Christopher Watson, Edward S. Hu, Jing Cao, Dinesh Jayaraman, Leslie Pack Kaelbling, Tomás Lozano-Pérez
We propose a planning-based robotics system that solves complex real-world manipulation tasks directly from raw pixels and natural-language commands. Validated 'in-the-wild' at GRASP Lab.
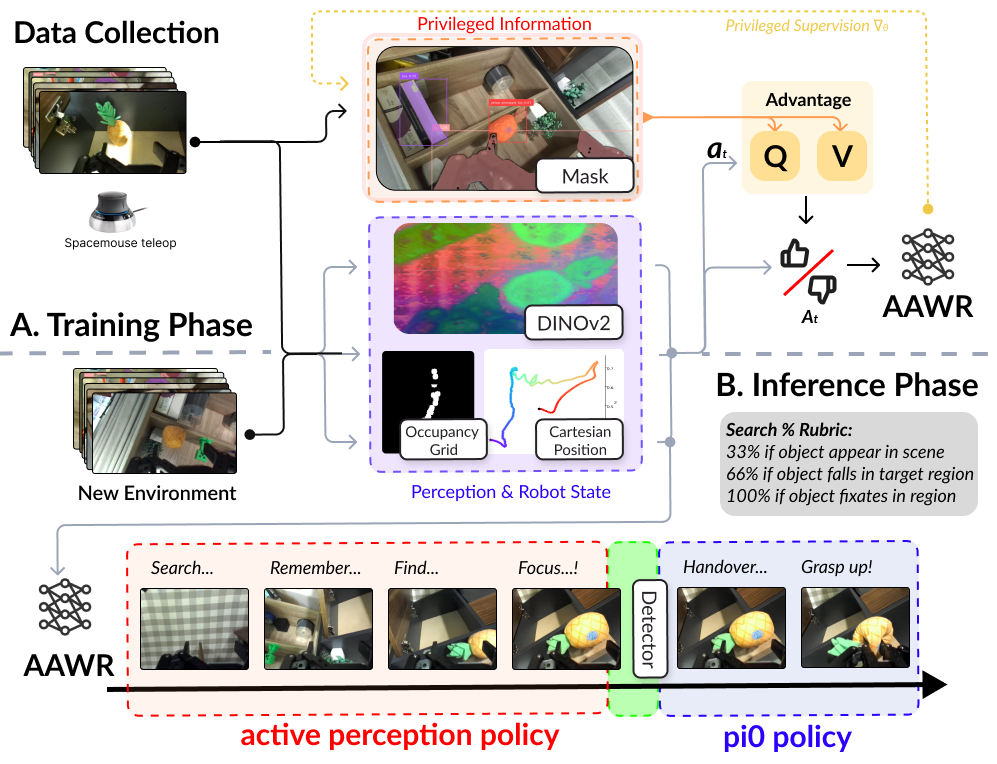
AAWR: Real World Reinforcement Learning of Active Perception Behaviors
Edward S. Hu*, Jie Wang*, Xingfang Yuan*, Fiona Luo, Muyao Li, Gaspard Lambrechts, Oleh Rybkin, Dinesh Jayaraman
We propose a simple robot learning recipe leveraging privileged information to train active perception policies on real robots.
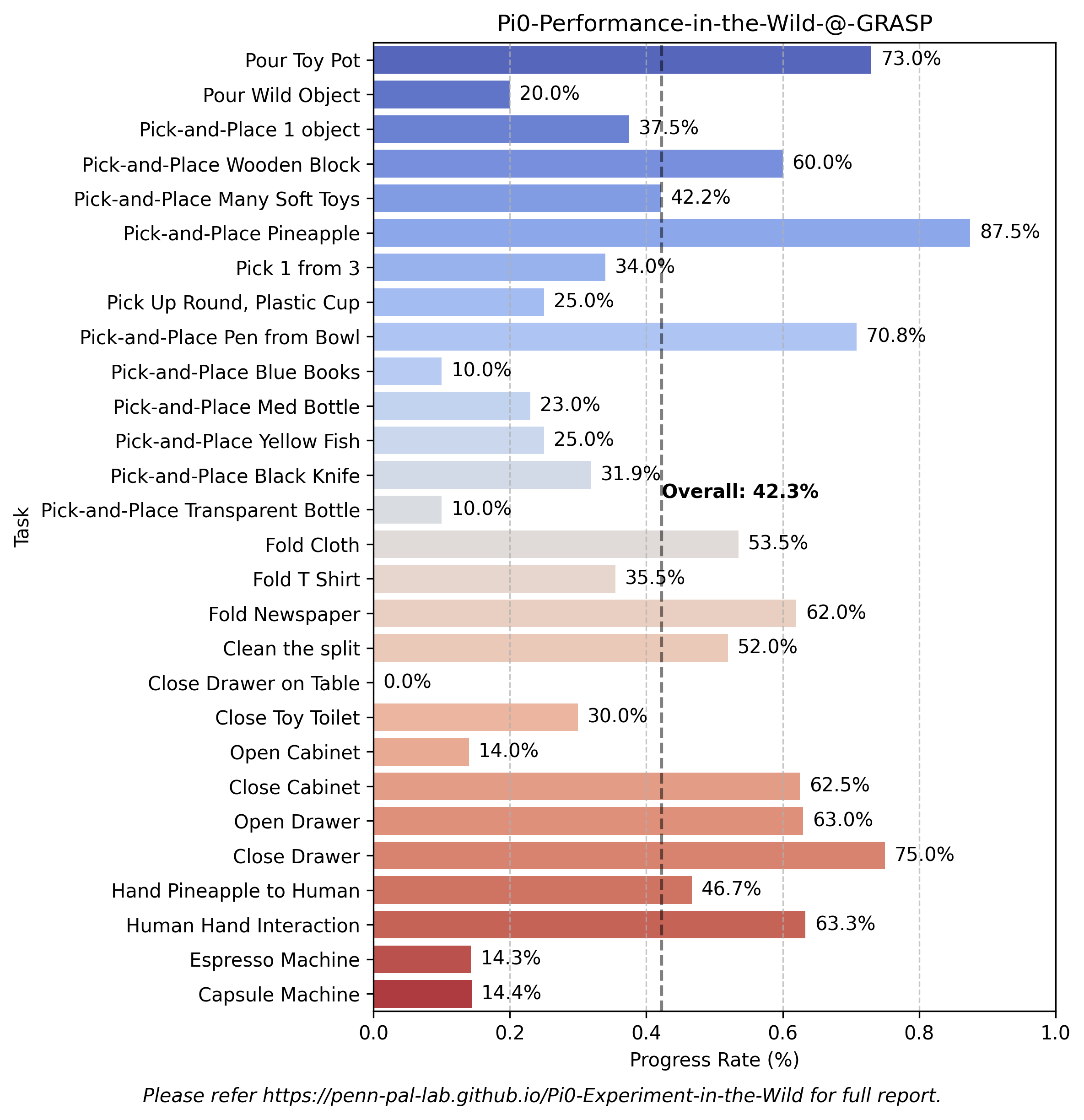
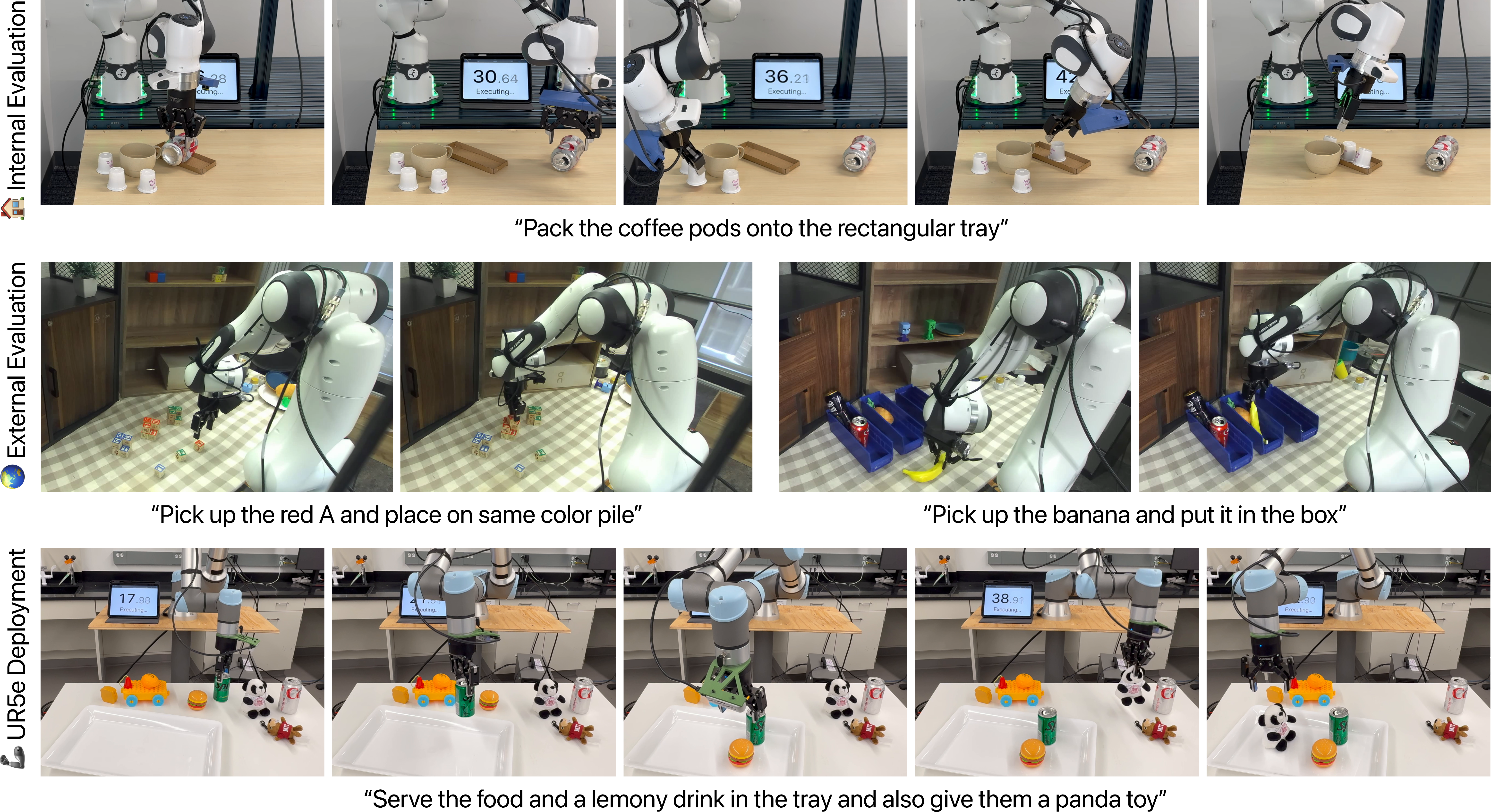
Evaluating pi0 in the Wild: Strengths, Problems, and the Future of Generalist Robot Policies
Jie Wang*, Matthew Leonard, Kostas Daniilidis, Dinesh Jayaraman, Edward S. Hu
We vibe-check pi0 across 300 trials on various manipulation tasks, summarizing our insights and observations across generalist robot policies.
Education
University of Pennsylvania
M.S.E. in Robotics
Advisor: Prof. Dinesh Jayaraman
Zhejiang University
B.E. in Electronic and Computer Engineering
University of Illinois at Urbana-Champaign
B.S. in Computer Engineering
Advisor: Prof. Said Mikki
Experience
Graduate Research Assistant — Daniilidis Research Group, GRASP Lab
Advisor: Prof. Kostas Daniilidis
Improving spatial reasoning of generalist robot policies (π0, OpenVLA) via guidance fields and reinforcement learning.
Research Intern — Dyna Robotics
Advisor: Dr. Jason Ma & York Yang
Building an agentic reasoning VLA for fine-grained manipulation, with persistent memory for long-horizon task execution.
Graduate Research Assistant — PennPAL Research Group, GRASP Lab
Advisor: Prof. Dinesh Jayaraman
Building VLM-based manipulation systems using diffusion policies for fine-grained tasks. Reproduced and benchmarked ReKep, SPHINX, and π0.
MLE Intern — IDEA-Computer Vision & Robotics Department
Advisor: Dr. Xiaoke Jiang & Prof. Lei Zhang
Built, trained, and optimized a human-centric video captioning model grounded in Grounding DINO 1.6 Pro for multimodal understanding.