Projects
Course projects, personal experiments, and other things I've built — from OS kernels and drone racing to philosophy coffee clubs.
2024
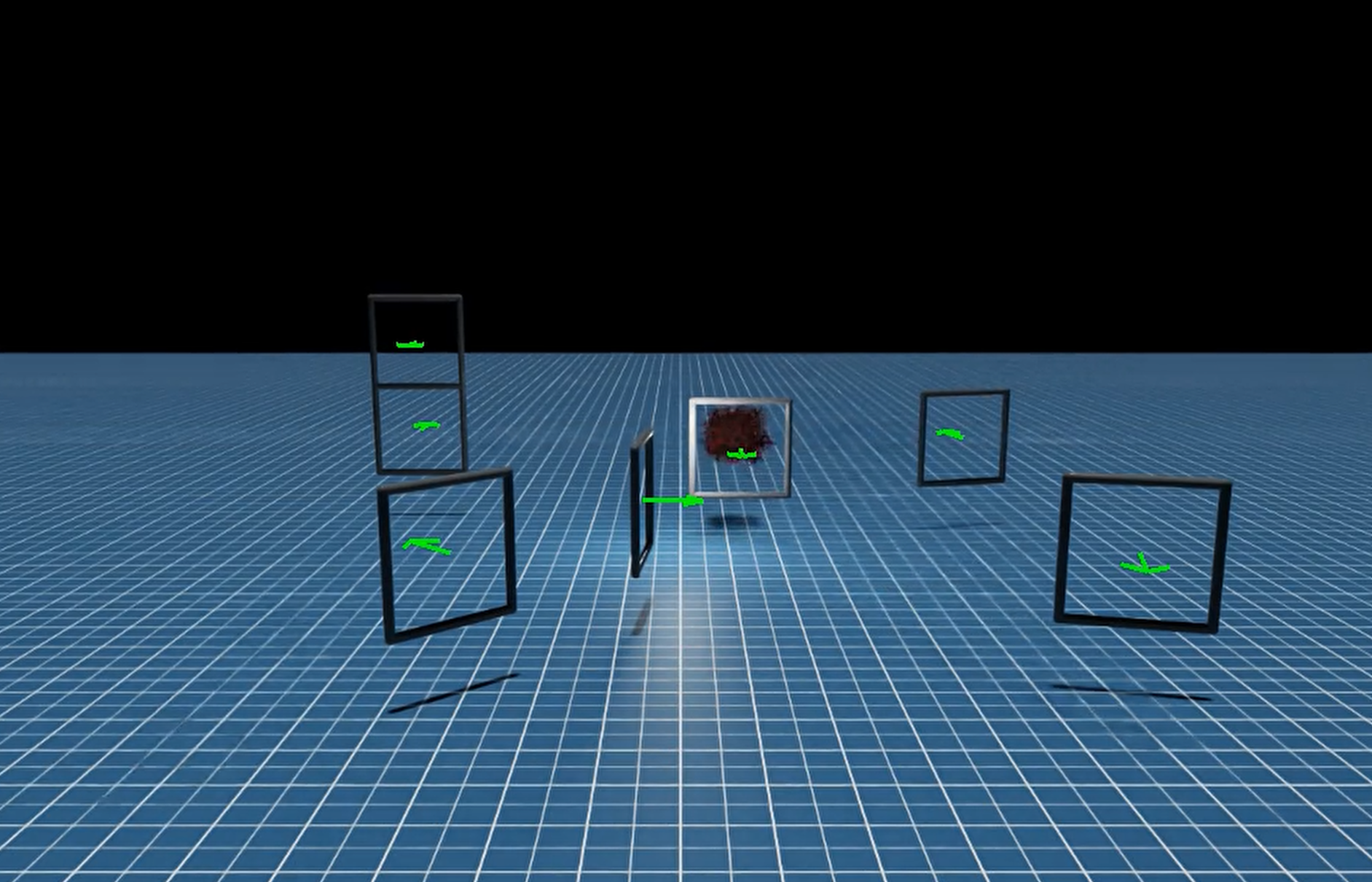
High-Speed Drone Racing via Deep Reinforcement Learning
Advisor: Prof. Antonio Loquercio. Built a drone racing simulation with curriculum tracks (ellipse, split-S, UZH) using OmniDrones on IsaacSim & IsaacLab. Designed a PPO-based reward shaping scheme, achieving a 40.7% success rate and 7.94 m/s average speed on a 127 m track. Trained 150M frames across 250 parallel environments in 8 hours on 2× NVIDIA A6000 GPUs.
Code
PhiloCoffee Club
A student club at ZJU International Campus exploring the intersection of coffee culture and philosophy — building community through conversation and a shared cup.
Code2023
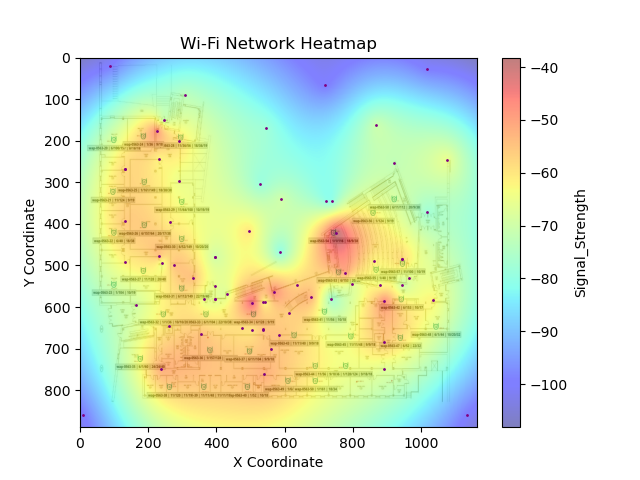
Campus Wi-Fi Network Analysis Tool
A Python toolkit for wireless network analysis, featuring signal-strength heatmap visualization and roaming mechanism profiling. Built in collaboration with the UIUC IT Network team to characterize and improve campus Wi-Fi infrastructure.
Code
Energy-Efficient Autonomous Driving for Shell Eco-marathon
Developed autonomous driving modules in ROS and validated them in CARLA (Unreal Engine 4). Focused on energy-efficient path planning algorithms tailored for the Shell Eco-marathon competition constraints.
2022
MentOS — Multi-terminal OS Kernel
Implemented a Linux-like OS kernel in C and x86 assembly, covering paging and virtual memory, IDT/GDT setup, and an i8259-based interrupt controller. Wrote device drivers for RTC, keyboard, and PIT, plus a read-only filesystem. Established full user/kernel system call linkage with preemptive task scheduling and multi-terminal switching.
Code2021

Autonomous Sensor Stack for Baidu Apollo D-kit
Assembled LiDAR, radar, and camera sensor stacks on a Baidu Apollo D-kit autonomous test vehicle. Constructed high-resolution LiDAR maps across the ZJU International Campus.