Research
I work on vision-language-action models, embodied reasoning, and robot learning — with a focus on systems that are validated on real hardware, not just in simulation. * denotes equal contribution.
Featured
TiPToP: A Modular Open-Vocabulary Planning System for Robotic Manipulation
William Shen, Nishanth Kumar, Sahit Chintalapudi, Jie Wang, Christopher Watson, Edward S. Hu, Jing Cao, Dinesh Jayaraman, Leslie Pack Kaelbling, Tomás Lozano-Pérez
We propose a planning-based robotics system that solves complex real-world manipulation tasks directly from raw pixels and natural-language commands. Validated 'in-the-wild' at GRASP Lab.
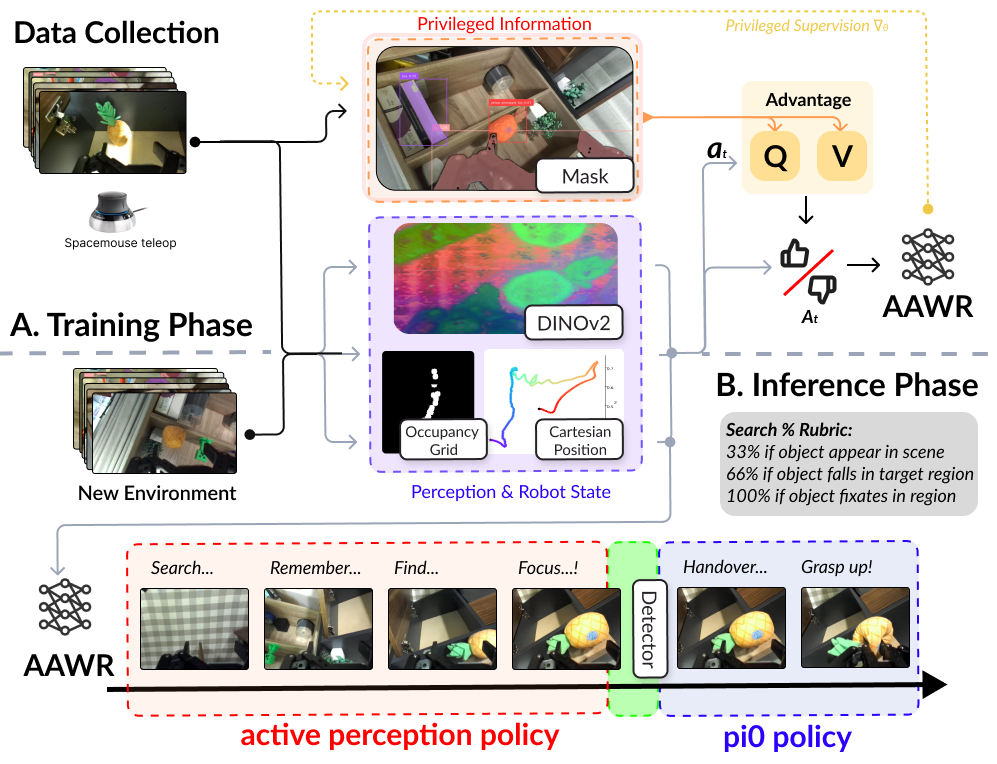
AAWR: Real World Reinforcement Learning of Active Perception Behaviors
Edward S. Hu*, Jie Wang*, Xingfang Yuan*, Fiona Luo, Muyao Li, Gaspard Lambrechts, Oleh Rybkin, Dinesh Jayaraman
We propose a simple robot learning recipe leveraging privileged information to train active perception policies on real robots.
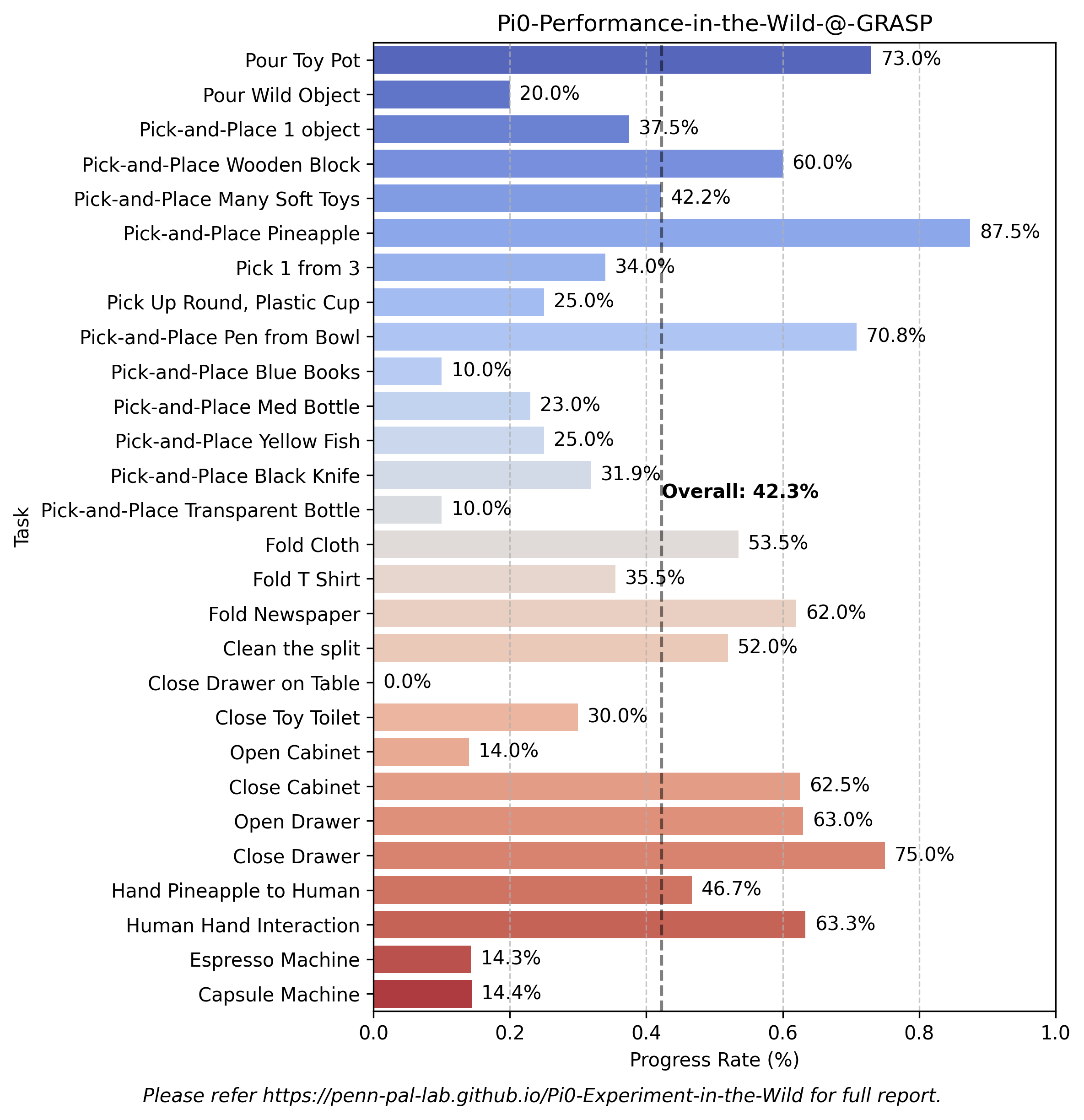
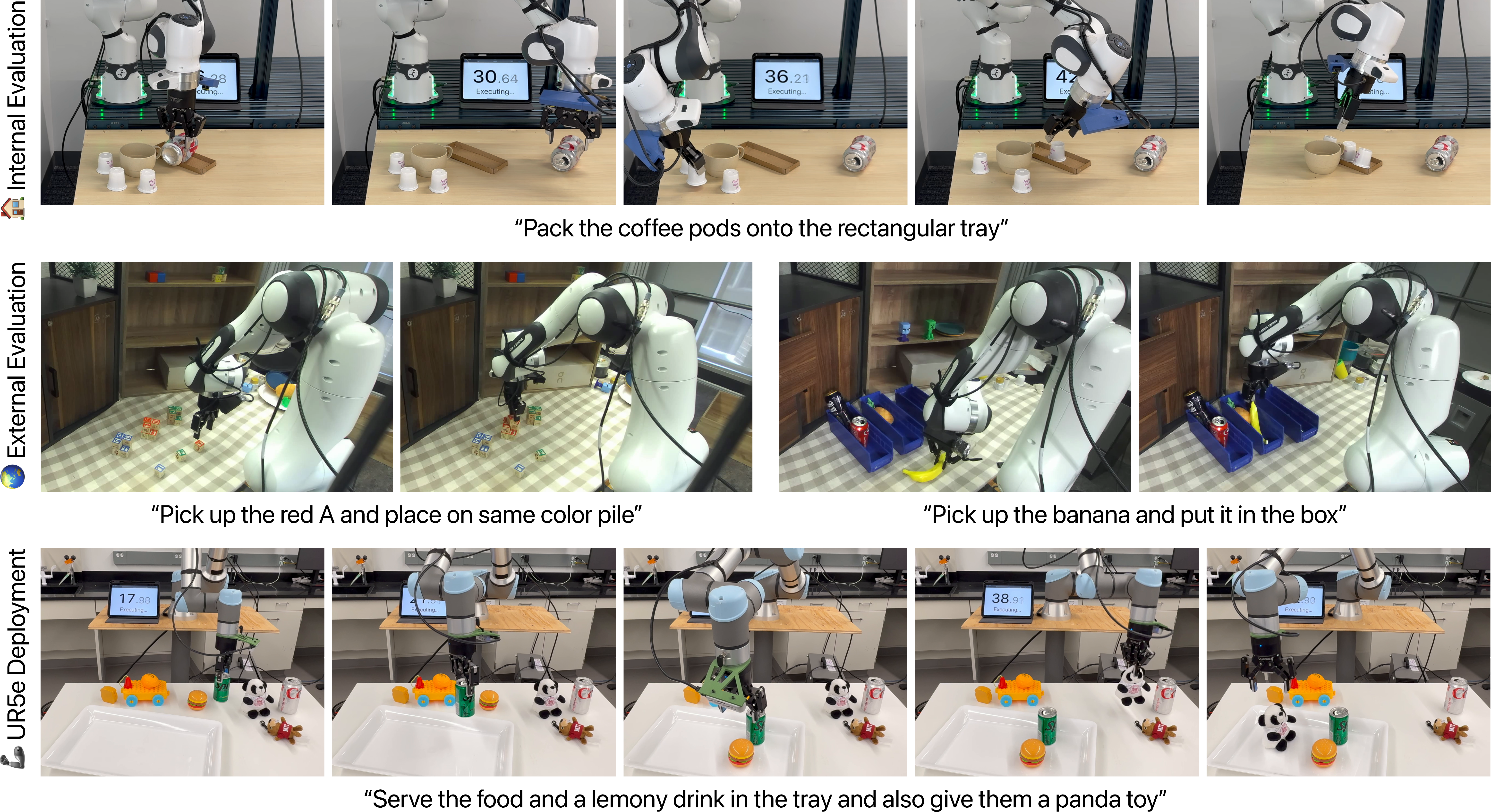
Evaluating pi0 in the Wild: Strengths, Problems, and the Future of Generalist Robot Policies
Jie Wang*, Matthew Leonard, Kostas Daniilidis, Dinesh Jayaraman, Edward S. Hu
We vibe-check pi0 across 300 trials on various manipulation tasks, summarizing our insights and observations across generalist robot policies.
2026· 1 paper
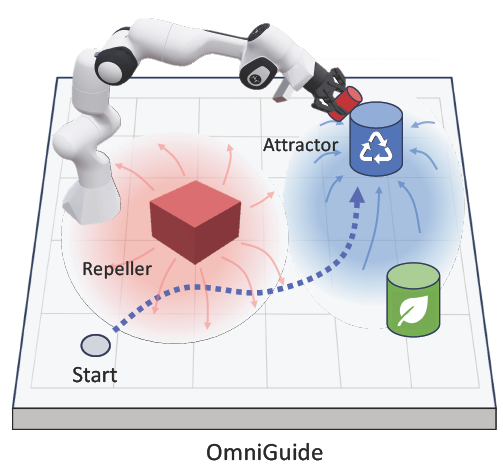
OmniGuide: Universal Guidance Fields for Enhancing Generalist Robot Policies
Yunzhou Song*, Long Le*, Yong-Hyun Park, Jie Wang, Junyao Shi, Lingjie Liu, Jiatao Gu, Eric Eaton, Dinesh Jayaraman, Kostas Daniilidis
A flexible framework that improves VLA performance on spatial reasoning tasks by leveraging prior knowledge from 3D foundation models, semantic-reasoning VLMs, and human trajectory demonstrations.
2025· 3 papers
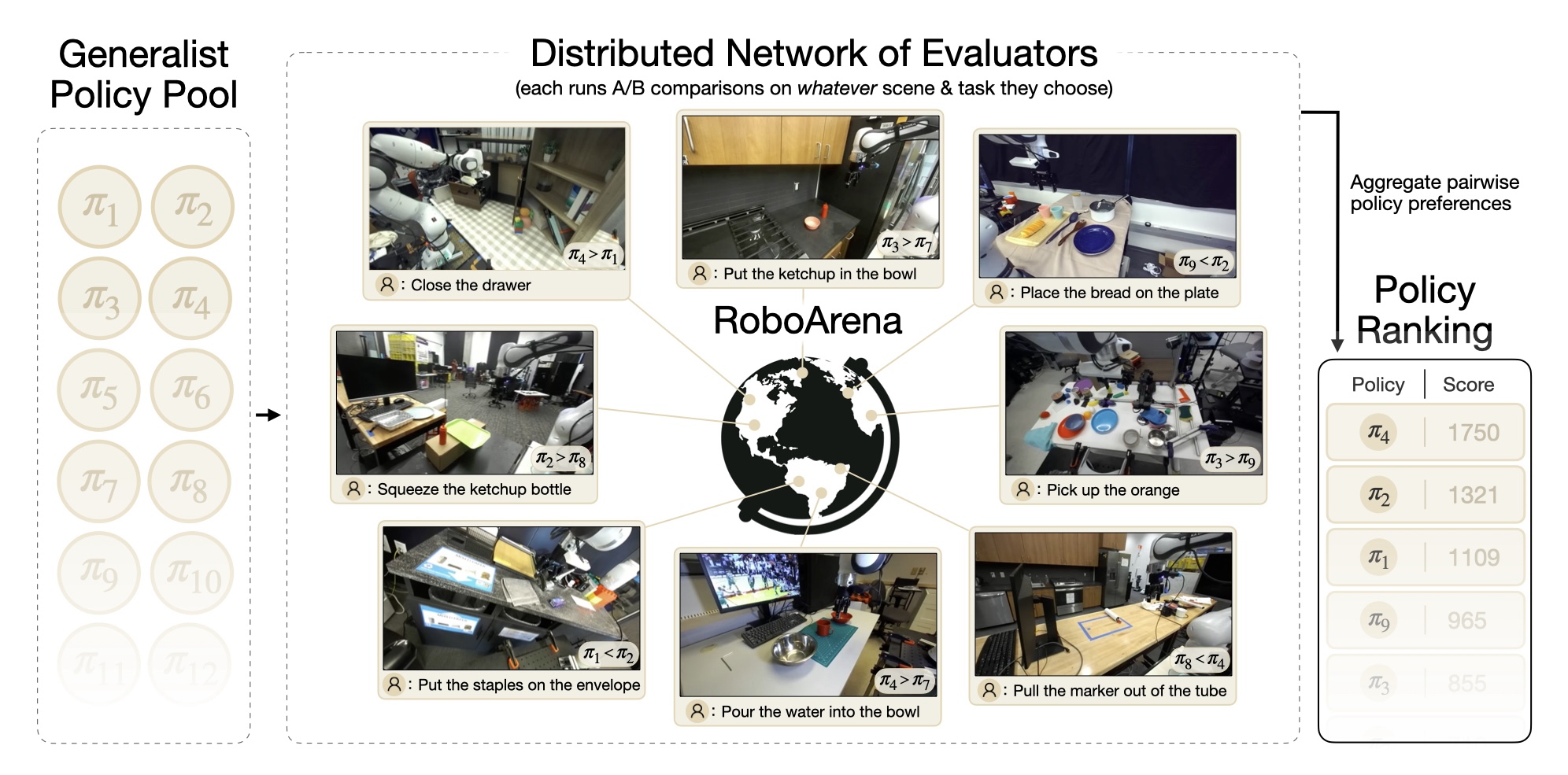
RoboArena: Distributed Real-World Evaluation of Generalist Robot Policies
RoboArena Team
A distributed real-world evaluation framework for generalist robot policies.
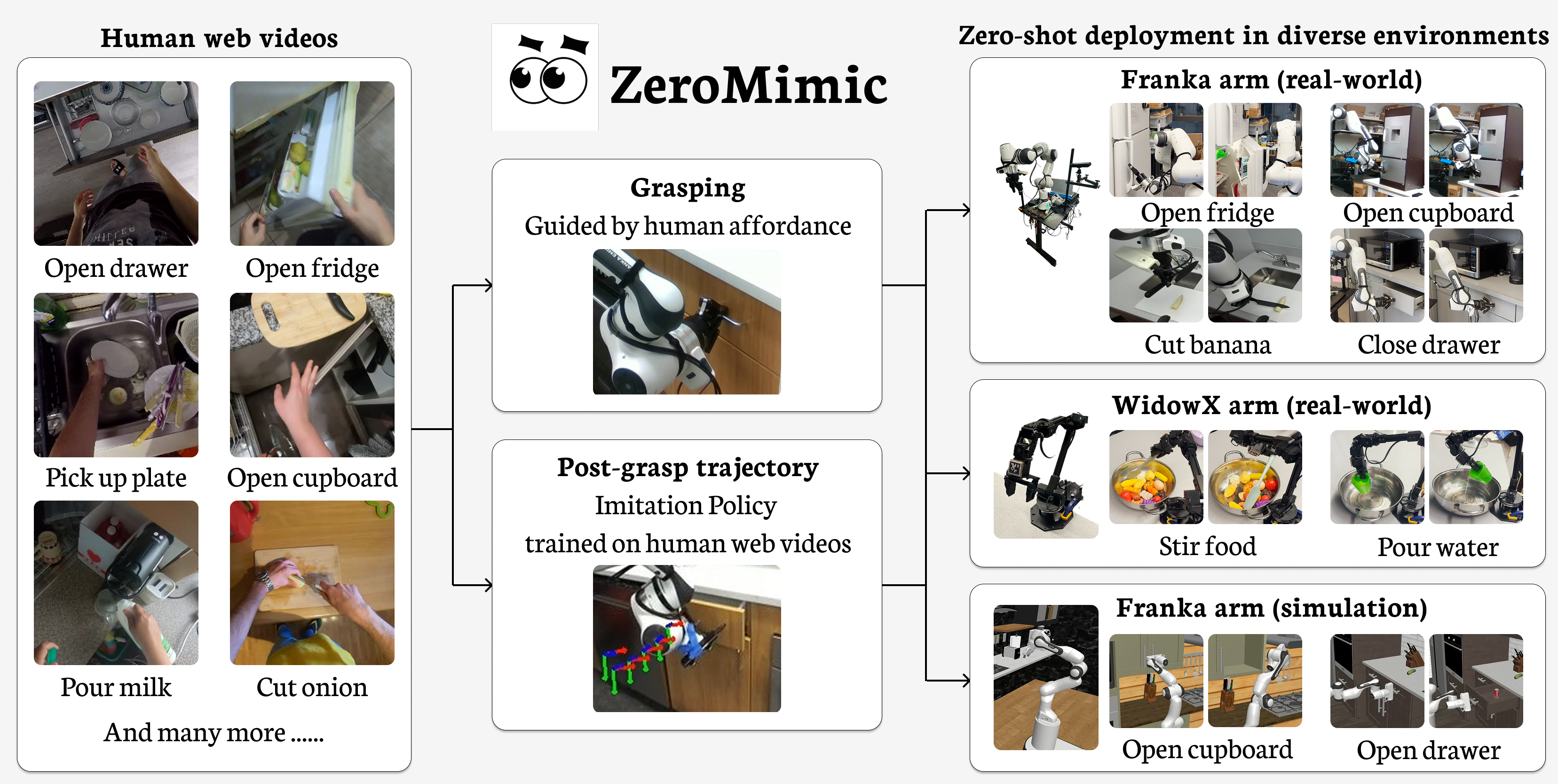
ZeroMimic: Distilling Robotic Manipulation Skills from Web Videos
Junyao Shi, Zhuolun Zhao, Tianyou Wang, Ian Pedroza, Amy Luo, Jie Wang, Jason Ma, Dinesh Jayaraman
Learning robotic manipulation skills from web videos with zero-shot generalization.
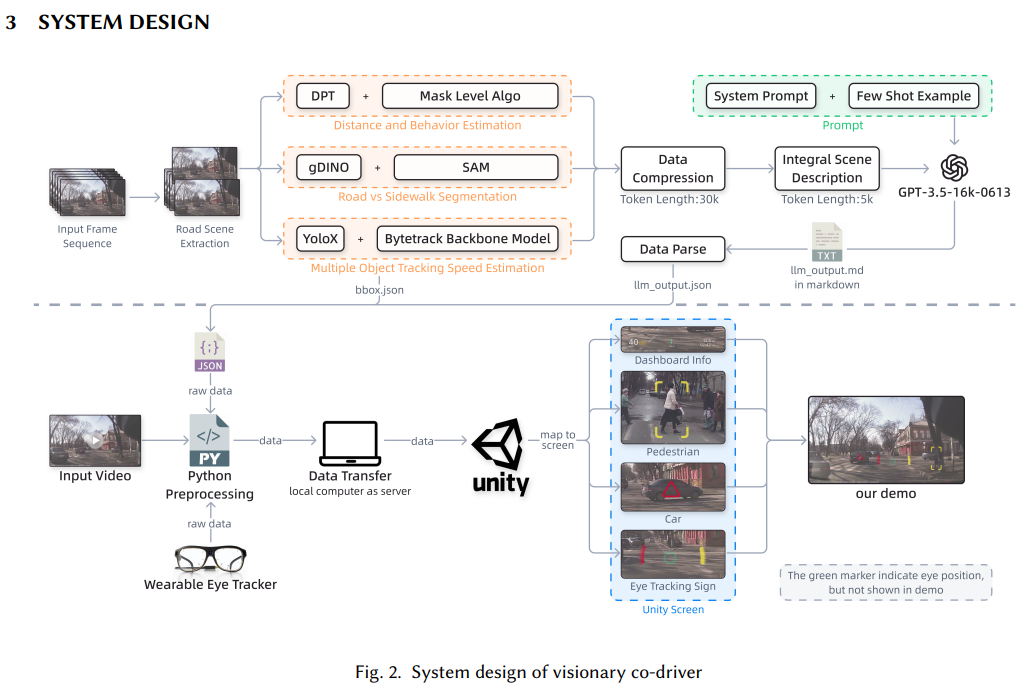
Visionary Co-Driver: LLMs Enhance Driver Risk Perception with ARHUD
Xiang Wei, Ziyue Lei, Jie Wang, Qi Zheng, Yingying Huang, Tianyi Zhang, Lingyun Sun
Using LLMs and Vision foundation models to analyze autonomous driving road scene, modeling the behavior of pedestrians. Construct a HUD system to evaluate the driver interaction.
2024· 1 paper
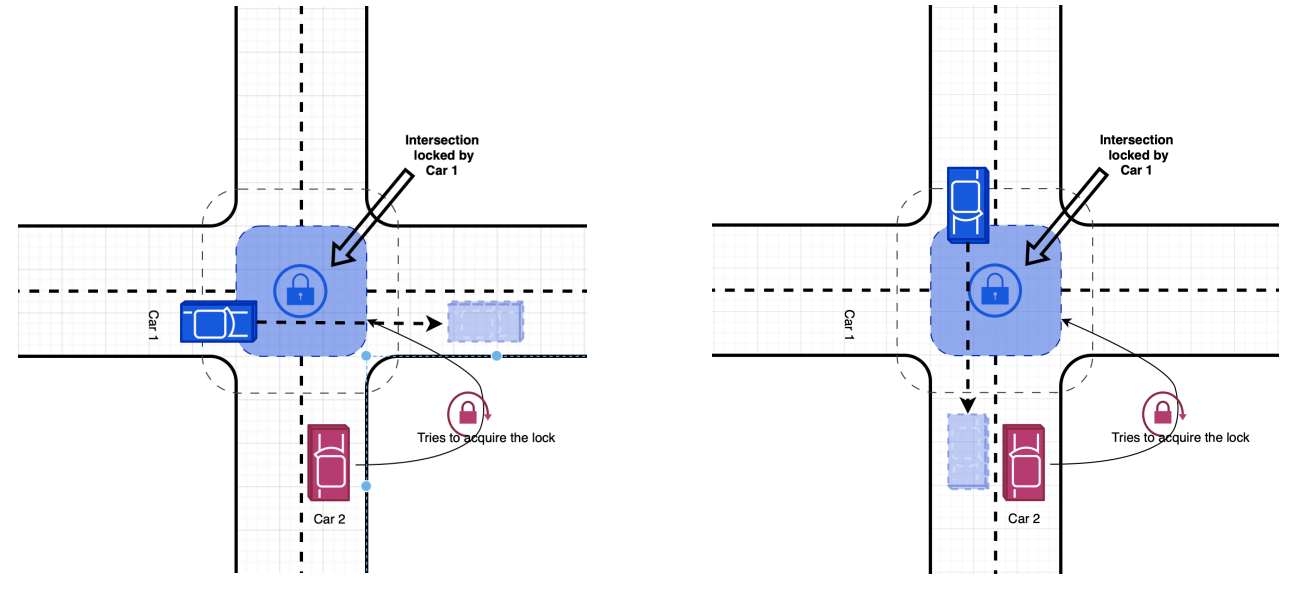
Real-time V2V Communication Network Cooperative Control System through Distributed Database
Xinwen Zhu, Zihao Li, Yuxuan Jiang, Jiazhen Xu, Jie Wang, and Xuyang Ba
Using distributed databases for collision avoidance, verified on Quanser Car at crossroad scenario.